|
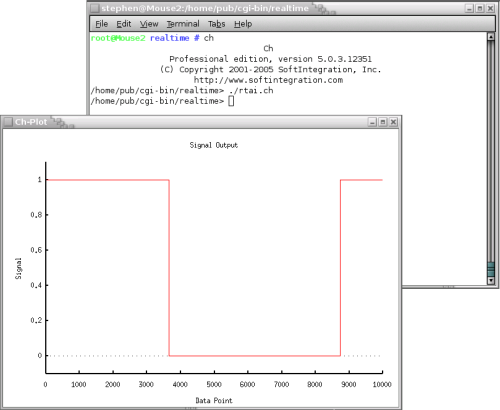
console_rtli.ch :
|
Source code for the command line version of the real-time application.
|
|
control.h :
|
Header file containing shared variable names.
|
|
DIO96.h :
|
Header file containing NI DIO96 variable names.
|
|
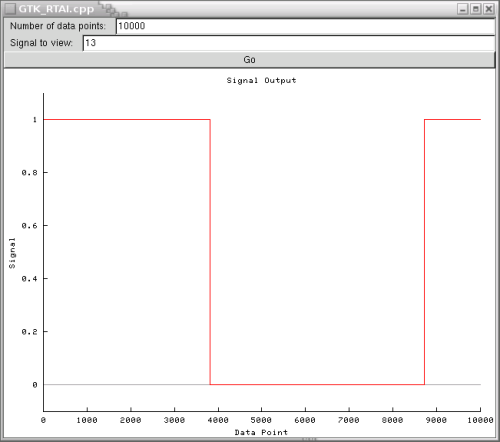
gtk_rtli.cpp :
|
Source code for the gui version of the real-time application.
Ch GTK+ and
Ch Magick
must be installed for this application to work.
|
|
Makefile:
|
Makefile used to build the real-time task module and real-time test application.
|
|
rt_task.c:
|
Source code for the real-time task.
|
|
rt_task_test.c:
|
Testing application to make sure that the real-time task and the NI DIO96 are working.
|
|
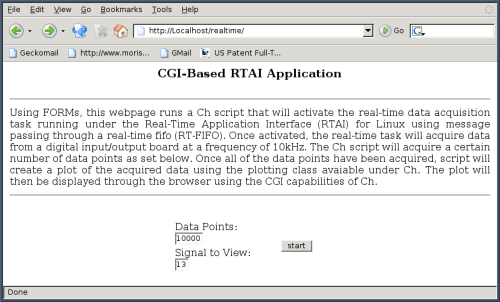
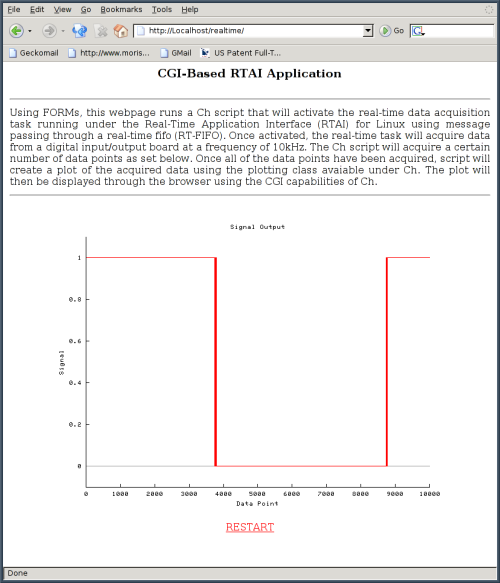
web_rtli.ch:
|
Ch CGI code for Web-based control.
|
index.html:
rtli.html:
form.html:
|
Website HTML for the Web-based control interface.
|